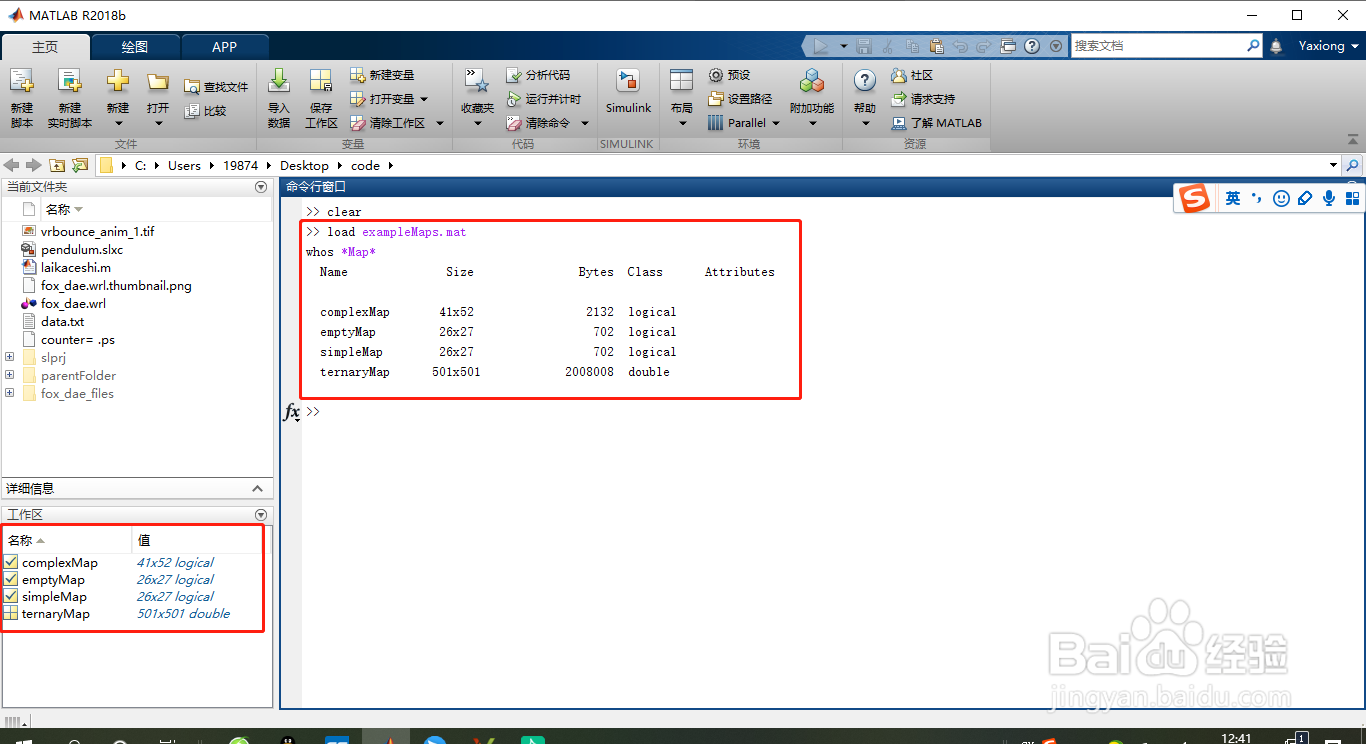
1、%加载两个映射,simpleMap和complexMap作为逻辑矩阵。使用who来显示地图。
命令行键入:
load exampleMaps.mat
whos *Map*
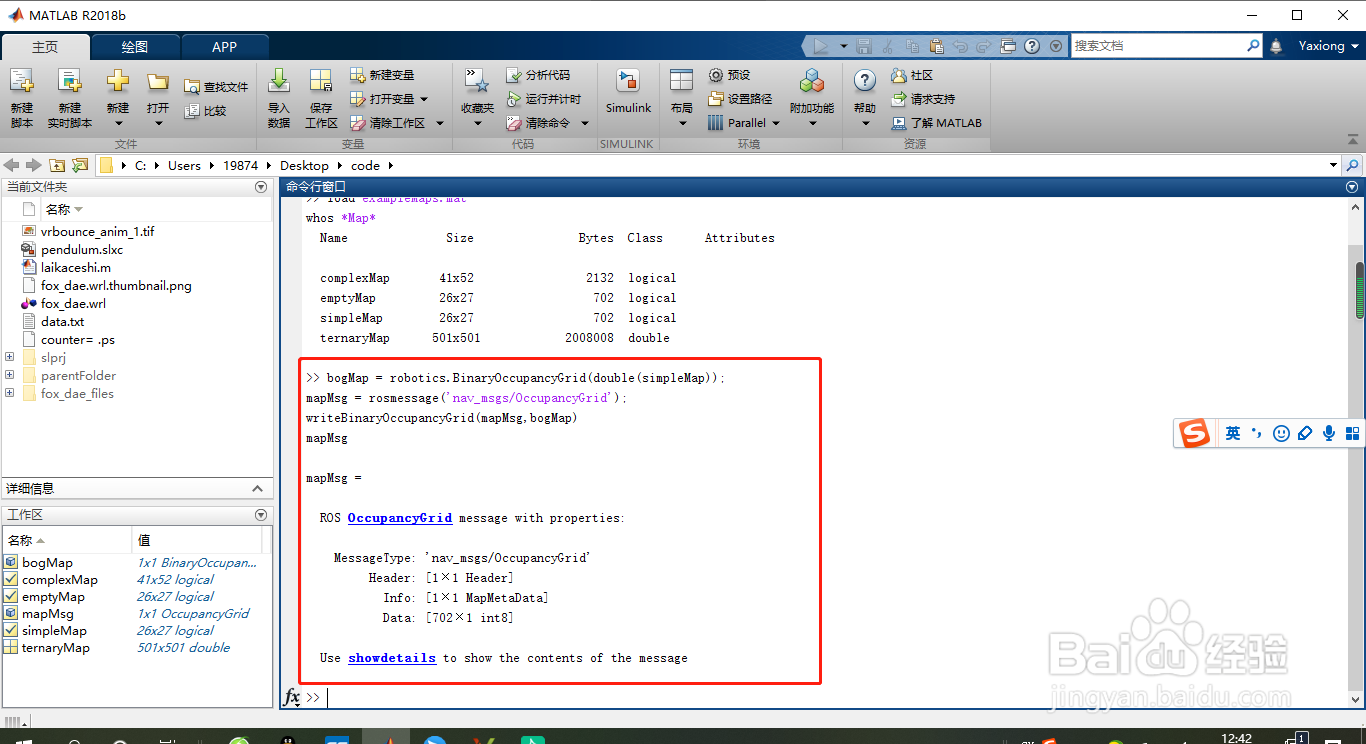
2、%使用一个binary佔有人网格对象从simpleMap创建一个ROS消息。使用writebinary佔用网格来编写佔用网格信息。
命令行键入:
bogMap = robotics.BinaryOccupancyGrid(double(simpleMap));
mapMsg = rosmessage('nav_msgs/OccupancyGrid');
writeBinaryOccupancyGrid(mapMsg,bogMap)
mapMsg
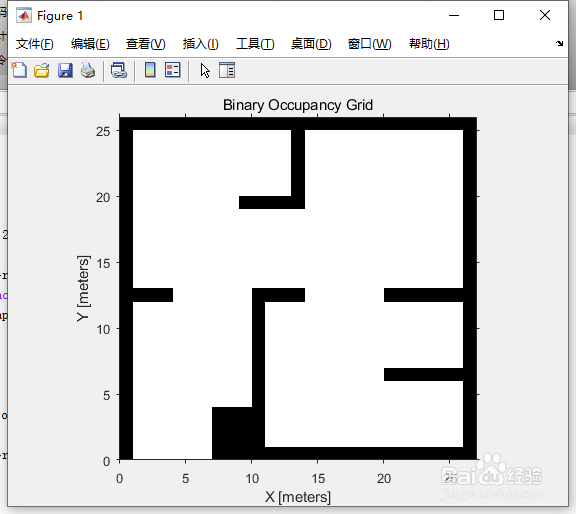
3、%使用readbinary佔用网格将ROS消息转换为abinary佔用网格对象。使用object函数show来显示地图。
命令行键入:
bogMap2 = readBinaryOccupancyGrid(mapMsg);
show(bogMap2);
4、最后清理命令行窗口,命令行键入:clc。
5、清理工作区,命令行键入:clear。